
PhD Thesis: Autonomy of the Artificial
This thesis takes inspiration from one of the most sophisticated control systems in nature, the mammalian brain, to translate principles of biological autonomy into artificial machines. The result is a vision of robots endowed with a sense of purpose: Agents that act not merely to execute external commands, but to sustain themselves.
Read More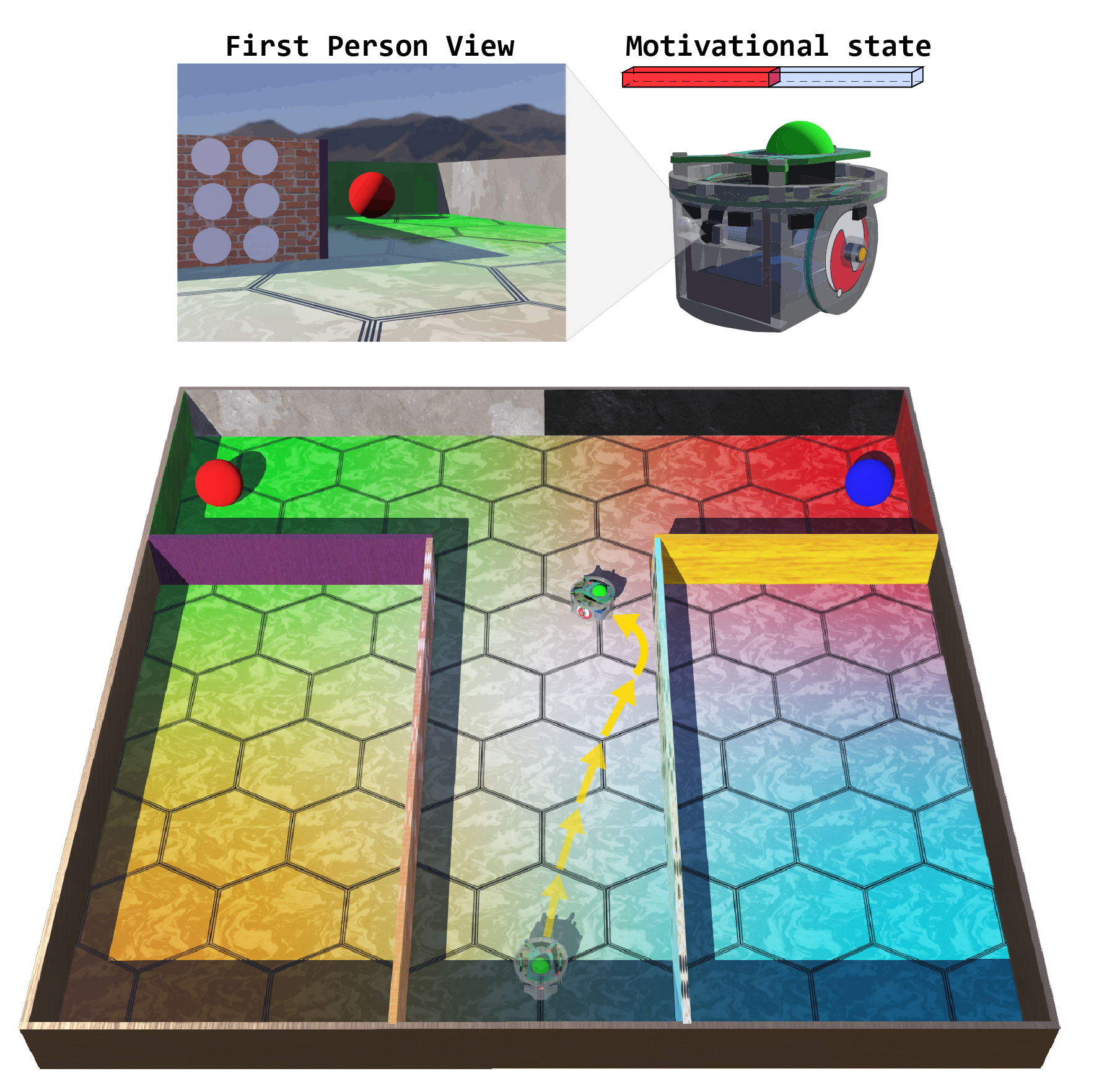
Motivational Cognitive Maps Allow Robot Biomimetic Autonomy
The Motivational Hippocampal Autoencoder (MoHA) generates motivationally modulated cognitive maps.
Read More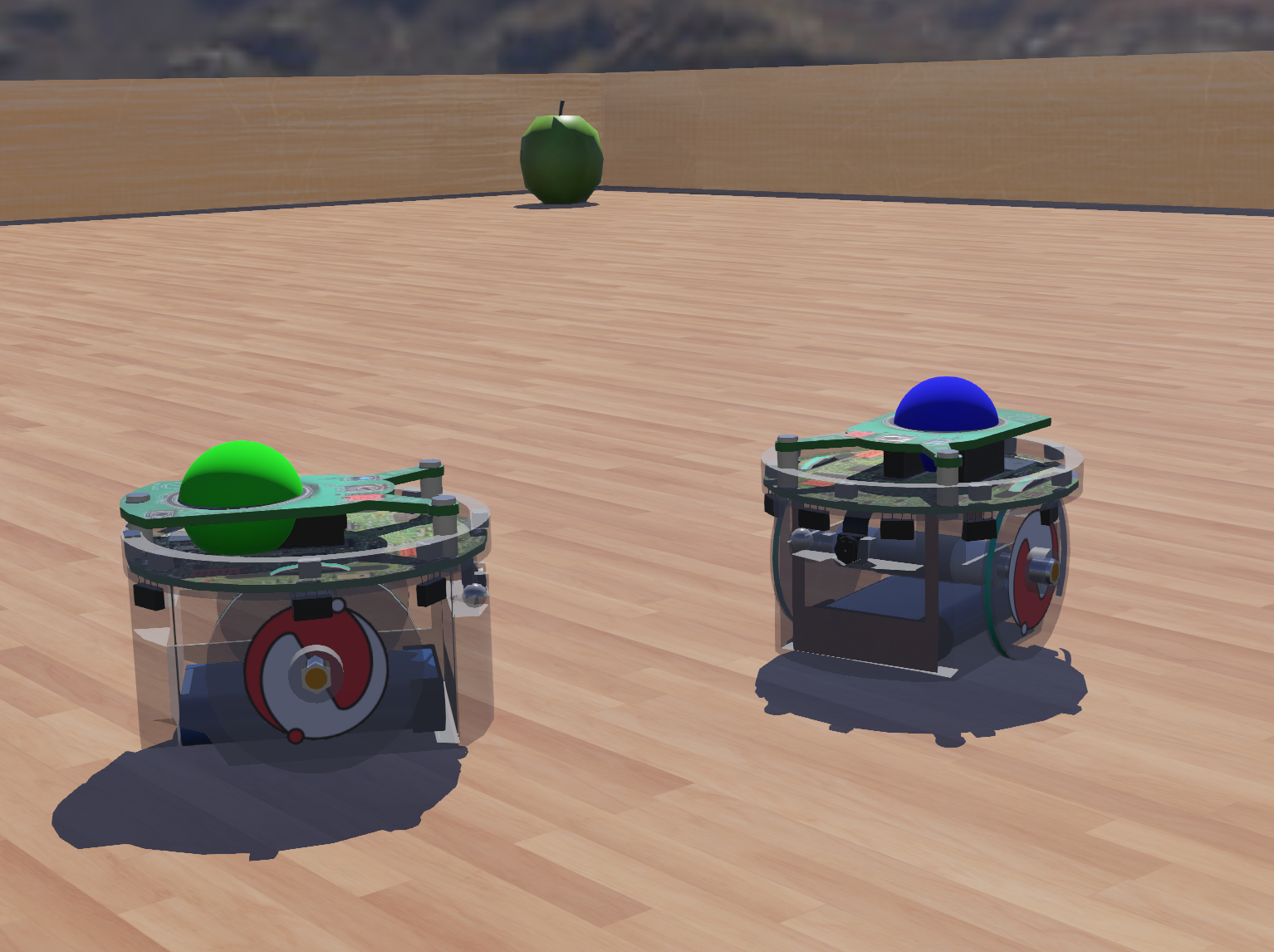
Biomimetic self-regulation in intrinsically motivated robots
A Neural-mass allostatic model allows to replicates self-regulatory behaviors of Namib desert lizards.
Read More
DAC-HRC: A socially adaptive cognitive architecture
Socially adaptive cognitive architecture for human-robot collaboration in industrial settings.
Read More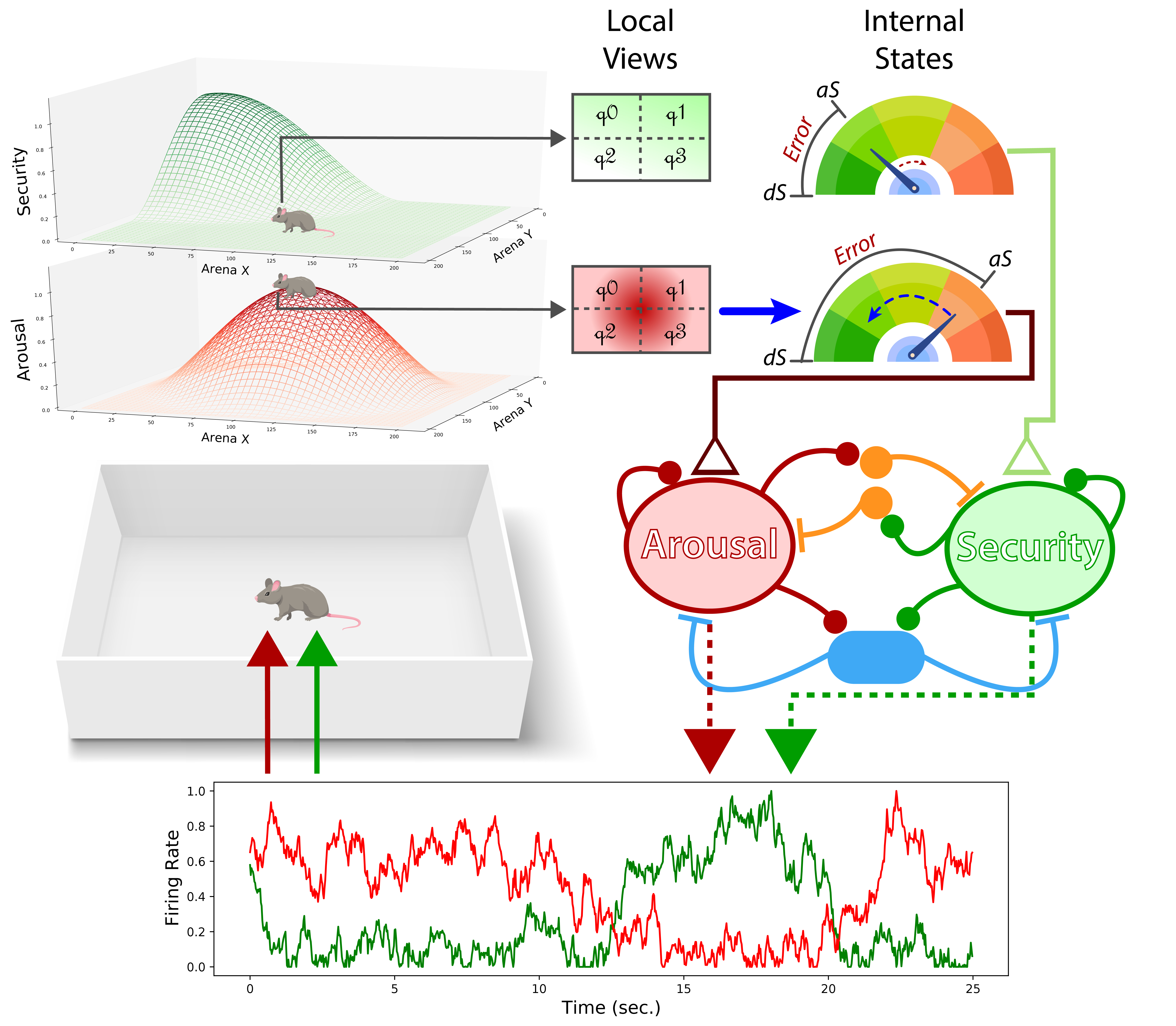
Drive competition underlies effective allostatic orchestration
Research article: A biologically-grounded attractor model of allostatic orchestration embedded into a synthetic agent.
Read More
Robot regulatory behaviour based on homeostatic and allostatic principles
What are the fundamental self-regulatory principles an autonomous agents should integrate?
Read More
Distributed Adaptive Control: A Cognitive Architecture Candidate for Controlling a Robotic Recycling Plant
Could the Fourth Industrial Revolution (Industry 4.0) be cognitive?
Read More
The Use of Social Sensorimotor Contingencies in Humanoid Robots
A pilot study exploring the effects of robot personality (Introvert vs. Extrovert) in HRI.
Read More© oscarguerrerorosado.github.io. All Rights Reserved.